
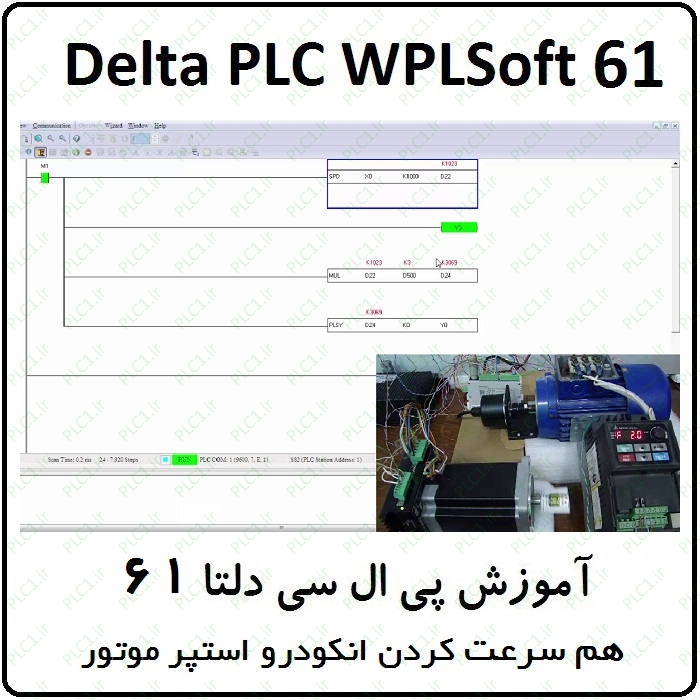
منظور از انکودر در اینجا موتور است . با استفاده از انکودر از سرعت موتور فیدبک میگیریم .
این کار توسط دستور SPD انجام میشود .
سپس با یک ضریب ، به پالس استپر انتقال داده میشود .
برای تغییرات آنلاین از دستور SPD استفاده می کنیم .
دقت داشته باشید مقدار فرکانس استپر از یک حد مشخص نباید بیشتر شود .
این عدد از ماکزیمم پالس استپر و تنظیم دیپ سوئیچ های مربوط به پالس استپر به دست می آید .
برای اینکه در دستور PLSY ، بعد از تعداد پالس مشخص ، استپر توقف نکنه .
کافیست تعداد پالس رو صفر وارد کنید .
در این شرایط استارت و استپ Stepper Motor با انیل دستور plsy خواهد بود .
آموزش DELTA PLC پی ال سی دلتا 61 – هم سرعت کردن انکودر و استپر
من تقریبا تمام فیلم های آموزشی شما رو دیدم و با بعضی از فیلم های آموزشی دیگر سایت ها مقایسه کردم واقعا فیلم های آموزشی شما یک یک عالیییییییی دستتون درد نکنه انشالله همیشه یک باشین
👌👌❤️❤️