
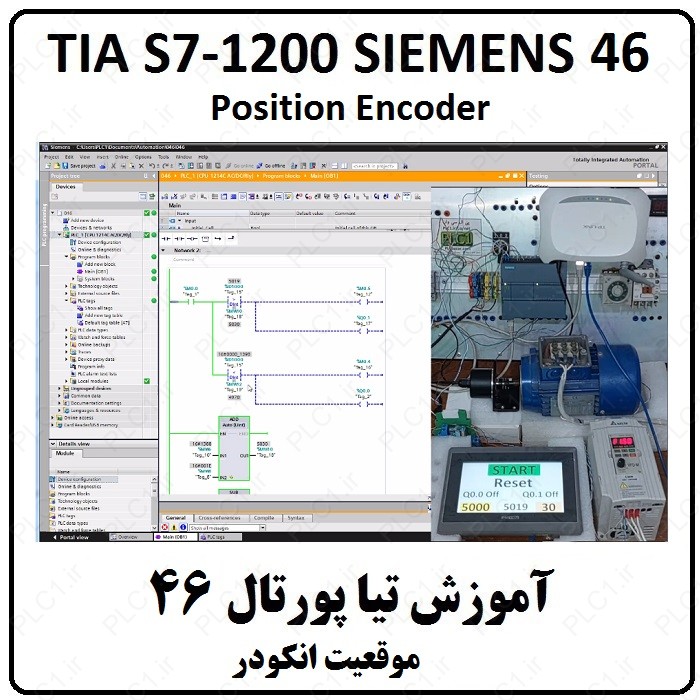
در اینجا قصد داریم با دو خروجی Q0.0 و Q0.1 در پی ال سی S7-1200 ، موقعیت انکودر کوپل شده با موتور را تنظیم کنیم .
از روی HMI پنل مستر یک عدد رو به عنوان Set point وارد می کنیم .
حالا باید انکودر عدد خودش را اعلام کند . این عدد در ID1000 ذخیره می شود .
اگر از SET POINT مثلا 500 بزرگتر بود ، برگردد . و اگر کوچکتر بود ، بره به سمت جلو .
این موقعیت هم به صورت زاویه و به صورت خطی می تواند در برنامه اضافه شود .
چون در این برنامه موتور به سمت چپ و راست حرکت می کند .
پس نوع انکودر تعریف شده در HSC نرم افزار TIA باید A/B Count باشد .
نکته بعدی این است که نیازی به وقفه نداریم .
اگر بخواهیم در برنامه با یک باتن مقدار انکودر را ریست کنیم در CTRL-HSC از count Value استفاده می کنیم .
در غیر اینصورت به CTRL-HSC هم نیازی نیست .
این برنامه با مقایسه کار می کند . کوچکتر و بزرگتر .
البته از اونجایی که اینورتر کمی لختی دارد ، و نمیتواند مثل استپر و سروو ، در جا بیاستند .
برای آن از تلرانس استفاده کردیم .
یعنی وقتی Set point عدد 500 است . وقتی به 500 میرسه ممکنه کمی ازش رد بشه .
باز دوباره میخواد برگرده و دوباره از 500 کوچکتر بشه و تغییر جهت بده .
برای همین مقدار ست پوینت را با عدد تلرانس جمع و تفریق می کنیم .
مثلا 50 . حالا اگر مقدار عددی انکودر از 550 بزرگتر و از 450 کوچکتر شد . موتور به سمت چپگرد یا راستگرد کار می کند .
این 50 تا تلرانس مثبت و منفی باعث میشه ، موتور مدام روی عدد set point بازی نکند .