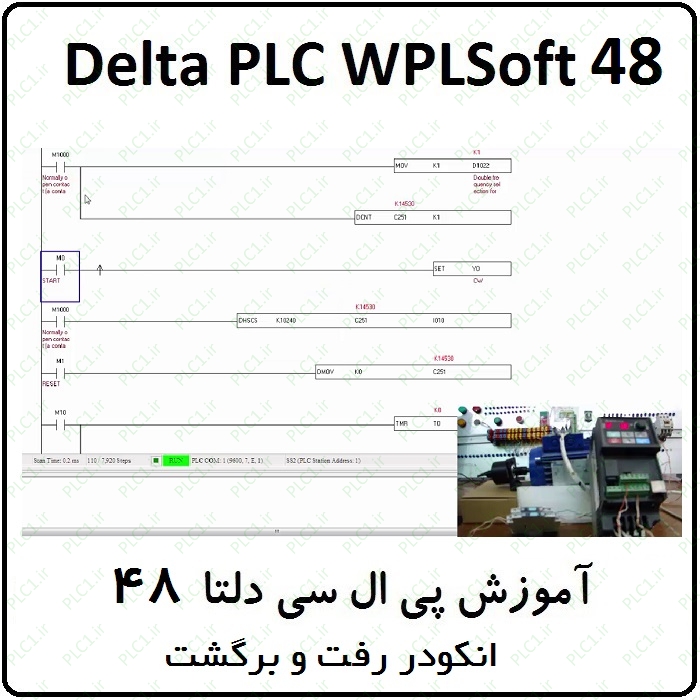
در این آموزش ، برنامه ای پیاده سازی شده است که یک انکودر کوپل شده به یک موتور به صورت رفت و برگشت حرکت می کند .
برای ابتدا و انتها یک زمان تاخیر و توقف در نظر گرفته شده است .
نکته ای که باید در نظر داشته باشید این است که در برنامه فقط از یک وقفه و DHSCS استفاده شده است .
از آنجایی که در مسیر افزایش ما به تعداد پالس مورد نظر رسیدیم و در برگشت از این مقدار پالس کم می شود .
برای همین به اندازه پالس های مسیر رفت ، قبل از شروع برگشت اضافه کردیم تا بتوانیم از همان DHSCS و وقفه استفاده کنیم .
البته با شرط های مختلف که بتوان با آن خروجی برگشت رو کنترل کرد .
برای دریافت آموزش های بیشتر و رایگان ، به سایت پی ال سی وان مراجعه کنید .
www.PLC1.ir
WhatsApp:+989112754501
https://www.instagram.com/plc1.ir
آموزش DELTA PLC پی ال سی دلتا 48 – انکودر رفت و برگشت