فرض رو بر این بگیرید در یک پروژه با استپر ، حد چپ و راست حرکت استپر با دو میکروسوئیچ ، سنسور القایی و . . . محدود شده باشد .
تعداد پالس استپر مشخص نیست و تا رسیدن به سنسور باید به حرکت خود ادامه دهد .
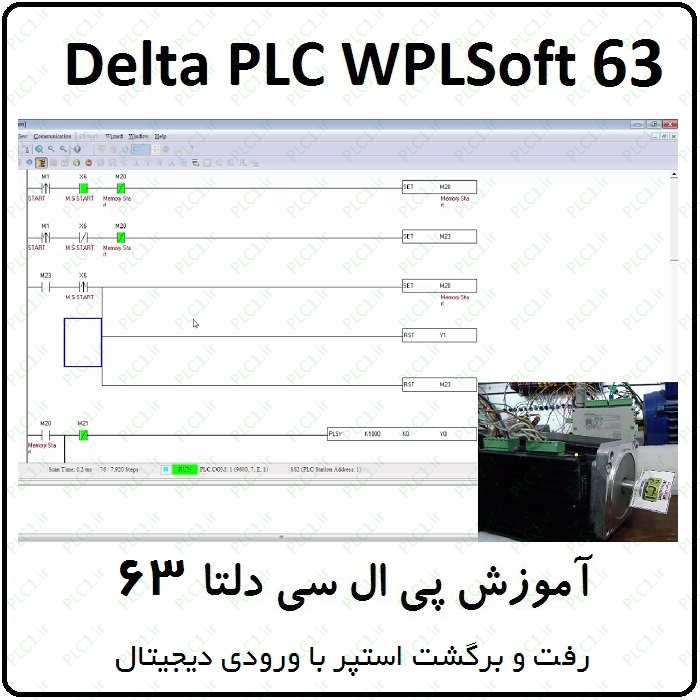
در این شرایط در قسمت تعداد پالس دستور PLSY ، مقدار صفر را وارد می کنیم .
رسیدن به سنسور یا ورودی دیجیتال باید انیبل دستور PLSY رو غیر فعال کند و حالت دوم رو فعال کند .
حال در برنامه اگر در لحظه اول در محل شروع نبودیم ، استپر باید حرکت کرده تا به محل شروع برسد .
سرعت رفت و برگشت لزوما نباید برابر باشد و در برنامه قابل تغییر است .
آموزش DELTA PLC پی ال سی دلتا 63 – رفت و برگشت استپر با ورودی دیجیتال